
焊裝又稱「機械裁縫」,是指將沖壓成型的工件焊裝成底板、頂蓋、側圍等分總成,再合裝成裸車身總成的過程。在焊裝產線上,有大量EMS/料車/料箱取放需求。為了組焊成高精度總成,以往主機廠會採用機器人示教+高精度工件限位完成取放零件。但綜合成本、產能、設備使用週期等方面考慮,此種方式無法達到生產效益最大化。
梅卡曼德將AI+3D視覺技術與汽車製造流程融合,針對焊接場景推出了3D視覺引導取放料系統。工作站透過導入此系統,對工件的型號、位姿進行判斷和修正,引導機械手臂完成精準抓放。 「AI+機器人」智能工作站不僅滿足了汽車彈性製造的需求,也從製程執行品質、產能目標、成本控制等方面為主機廠客戶保駕護航。
01 高性能3D視覺引導系統|精準抓放,助力焊裝自動化
傳統焊裝生產線,機器人示教抓取需將被抓工件置於高精度定位工裝上,有示教流程繁瑣、精治具造價高昂等問題。
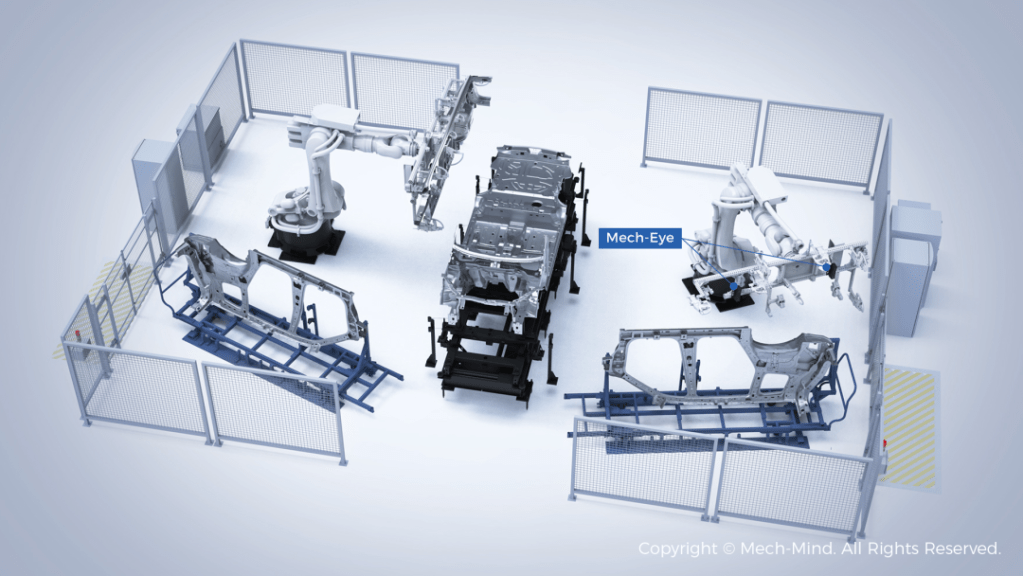
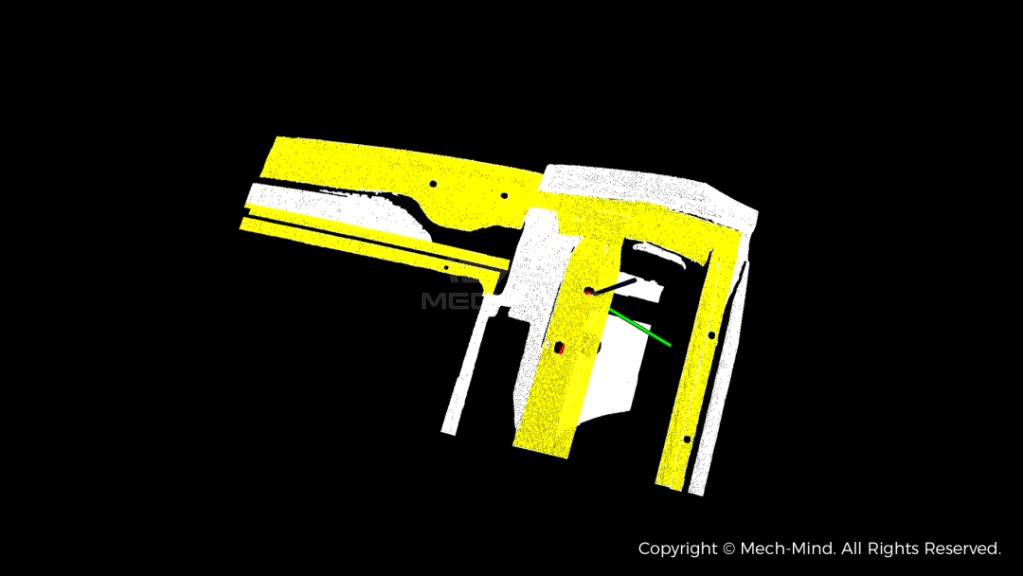
梅卡曼德3D視覺引導取放料系統,解決了待抓取物料需高精度限位問題。本系統主要由梅卡曼德高精度結構光3D相機Mech-Eye PRO S-THR/M-THR、Mech-Vision機器視覺軟體組成。基於先進的光學元件和成像演算法,3D相機可對深色吸光、高亮反光、粉塵/鋅層覆蓋的車身件產生高品質3D點雲資料。 Z軸精度高,輕鬆應付來料位置偏差大的情況。產品結構緊湊,安裝於機械手臂上完成對工件特徵3D資訊的擷取,靈活度高。


自研Mech-Vision機器視覺軟體,內建先進3D視覺演算法。取得Mech-Eye採集並產生3D資料後,對工件特徵(特徵孔、角點、弧線等)進行精確辨識定位,計算出機器人抓取位姿。可引導機器人完成支線料箱取放料、主線EMS/料車取件,協助建造無人化焊裝生產流水線。
02 先進AI技術|打造彈性生產模式
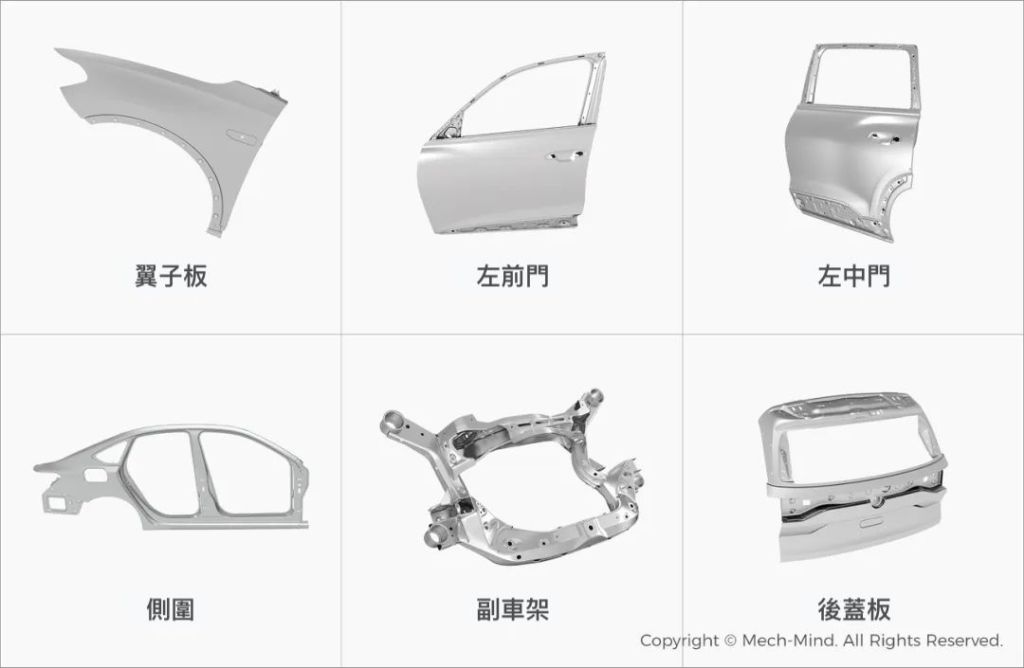
隨著消費者對汽車的需求日漸多樣化,汽車製造模式已轉向「少量多樣」。採用不限車型不限平台的彈性混線生產模式能夠節省成本、提高效率。並且可以根據市場變化調整生產計劃,既保證了汽車生產的規模效益,也滿足了市場多元化的需求。
梅卡曼德透過先進的AI技術,使3D視覺系統具備極強的兼容性及通用性,可相容於焊裝線體不同車型下的多品類工件。支援自適應夾具切換和導入,縮短夾具更換時間。梅卡曼德以AI技術為主機廠打造出「自適應生產鏈」,實現了任意車型快速換產,降低新車型導入的改造難度,大大提高生產線彈性度。
在成本控制方面,精治具、EMS/料車等工裝的設計得以大幅簡化,優化產線空間利用率,且在長期使用過程中無需再進行精度維護。在解決產線複雜環境光干擾問題上,Mech-Eye工業級3D相機採用了先進的光學技術,在20000lx-30000lx的環境光干擾下也能高品質成像,從而減少了補光、遮光設施的成本投入。
03 穩定可靠|保證產線長期穩定運行

汽車工廠有既定的產能目標,多為全自動化流水線,對於設備穩定性要求極高。梅卡曼德旗艦機型均已通過MTBF(平均無故障運行時間,Mean Time Between Failure)≥40000小時認證,相當於連續1666多天無故障穩定運行,可確保客戶現場長期穩定運行。
針對系統長期運作帶來的誤差、系統溫漂等問題,梅卡曼德可提供精度補償功能套件,可及時修正系統精度偏移量,並支援精度監控,確保系統精度穩定可靠。也提供快速標定功能套件,支援相機更換快速恢復標定,確保產線高效運作。
智能抓取技術能夠很好地應對主機廠線體佈局緊湊而引起的干涉,快速產生無碰撞的機器人運動路徑。視覺系統也支援異常工件報警(變形、尺寸工差等),確保焊合品質。
04 易用性持續升級|快速部署視覺應用
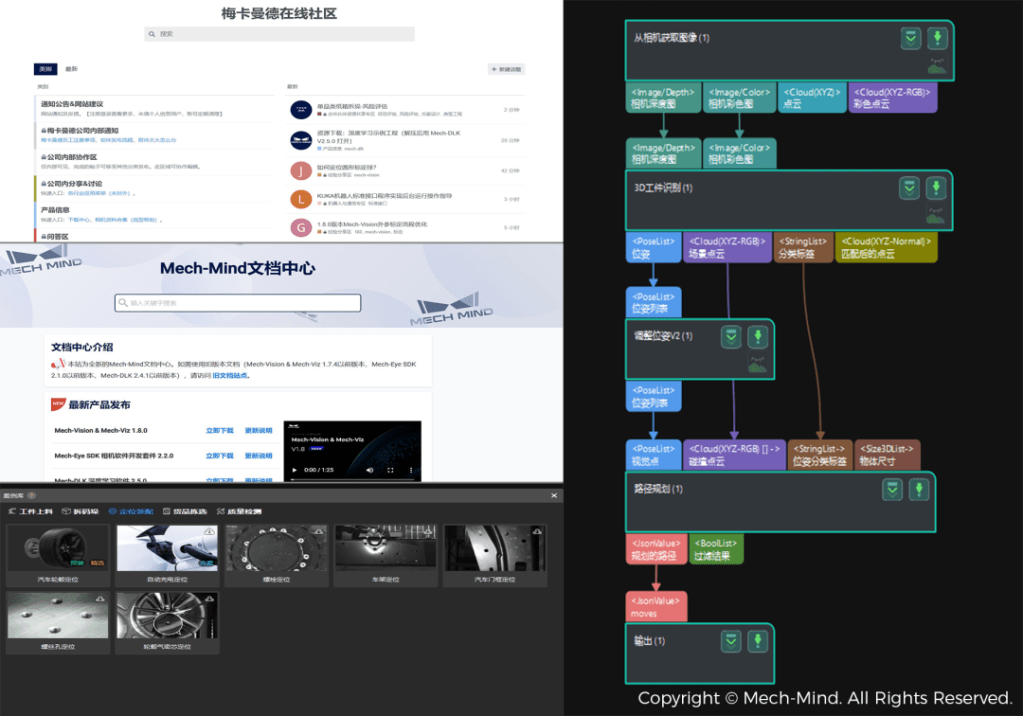
為了幫助用戶更快速、更方便地實現視覺功能,我們也對軟體易用性不斷升級。全新升級的Mech-Vision機器視覺軟體整合了通訊配置、相機標定、工件辨識、路徑規劃等功能,支援視覺應用的一站式部署。我們也提供範例工程、指導文件、學習地圖等資料,新手工程師也能快速完成視覺工程建構。
05 實際案例
此專案用戶為大陸某知名汽車品牌的製造工廠。在其焊裝車間抓件工位,導入了梅卡曼德3D視覺完成側圍外板的高精度插銷抓取,實現了多車型彈性切換抓件。工位建設成本及利用率大幅優化,目前已穩定投產。
梅卡曼德致力於以功能強大、簡單易用的智能機器人基礎設施產品,及交付、培訓、市場全通路支援。目前,已有許多合資車企和自主車企的焊裝自動化線體投入使用了梅卡曼德3D視覺引導抓放件系統,系統精度、穩定性均滿足實際需求,工位建設、運維成本大幅降低。
